Real-time radar display using HC-SR04 ultrasonic sensor and Processing-based visual interface.
I wanted to move beyond basic serial monitor text and create a project with a high-tech, visual interface. By mounting an HC-SR04 ultrasonic sensor onto a micro servo, I built a system that performs a continuous 180-degree sweep of the environment.
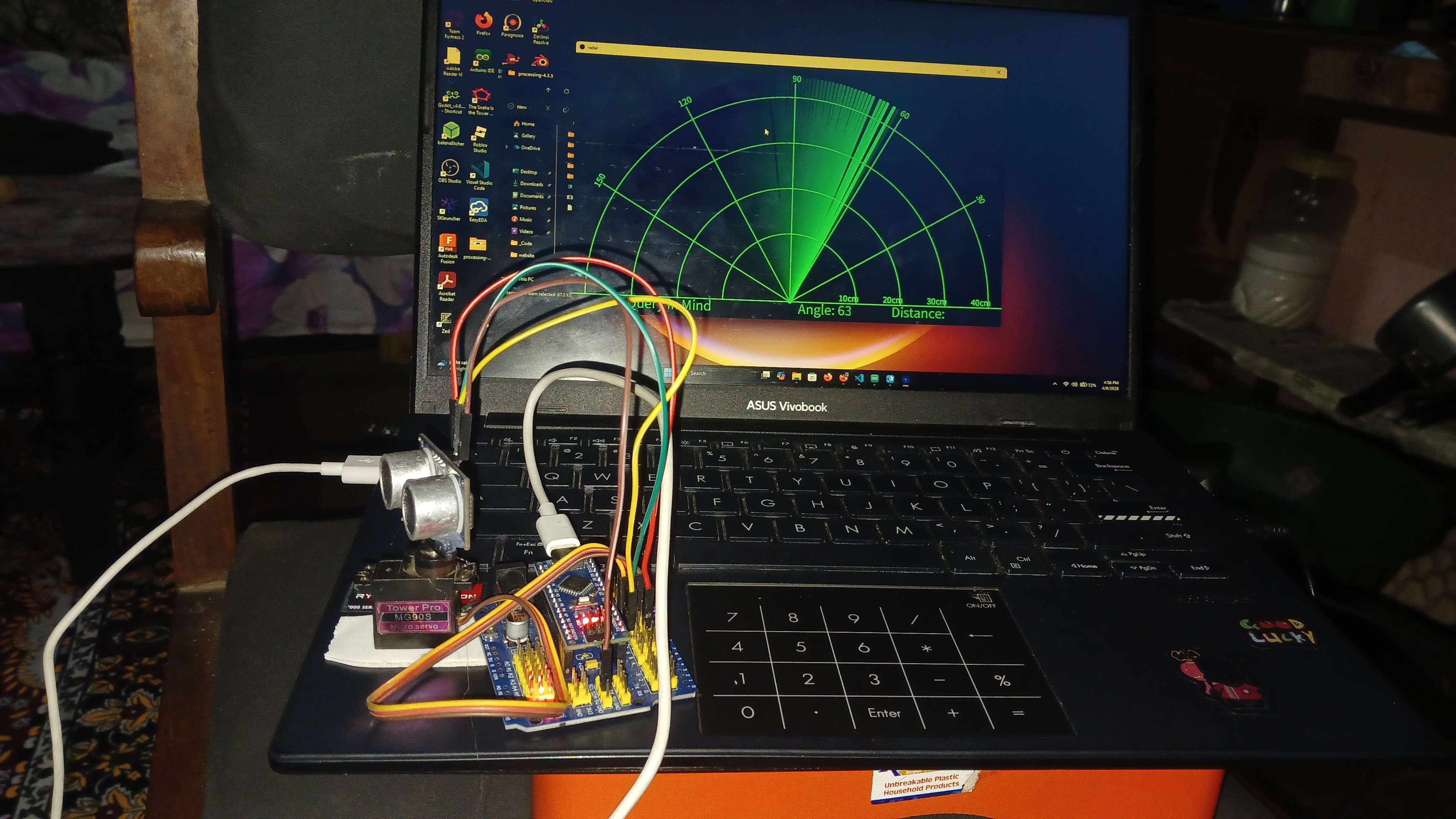
Instead of just logging distances, I used a Processing-based program that transforms raw data into a real-time radar display. As the servo rotates, the screen renders a green-phosphor sweep; when an object is detected, it appears as a red highlight at the exact angle and distance measured.
This project taught me how to bridge the gap between hardware sensors and graphical software, turning invisible sound waves into an intuitive, movie-style radar map. It's a clean, visual way to handle spatial data.
Sensing — HC-SR04 ultrasonic sensor mounted on a micro servo performs continuous 180° sweep, measuring distance to nearby objects via sound wave travel time.
Transmission — Arduino Uno sends angle and distance data via serial communication to the Processing application.
Visualization — Processing renders a green-phosphor radar display. The sweep line rotates in sync with the servo, and detected objects appear as red highlights at their measured angle and distance.